intro
GCN,传统的 GCN 加速通过将图形特征矩阵 ( X ) 与密集的小权重矩阵 ( W ) 相乘,然后通过稀疏-密集矩阵矩阵乘法 (SpMM)将结果输出与高度稀疏的不规则邻接矩阵 ( A ) 相乘。
Achievement
algorithmic optimization and hardware-level enhancement
- graph reordering, run-time community detection,graph partitioning
- workload balancing and efficient hardware mapping
challenges
- accelerators based on ASIC/FPGA instead of GPU
- GPU ...far from meeting performance limits
- Why
- Memory Traffic Challenges in GPU-based Frameworks
- row-wise multiplication
- still requires a substantial number of global memory transactions to access the input feature matrix
- linear scaling with
and
- Algorithmic Limitations and Resource Waste: This architecture-oblivious workflow consistently results in inefficient hardware utilization.
- Memory Traffic Challenges in GPU-based Frameworks
- Why
Proposed Research
- code
- pytorch frontend
- customizing the MaxK nonlinearity to select the top-kth element for each node embedding
- some sample technique?
- SpGEMM/SSpMM kernel
- Node-Balanced Feature Dimension Reduction through MaxK Nonlinearity
- 有损优化?
- Compressed Balanced Sparse Row (CBSR) format
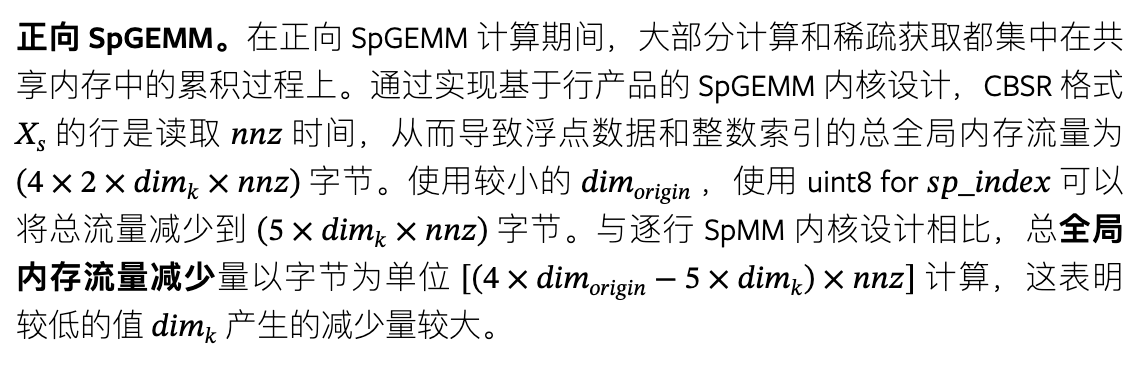
- Coalescing Enhanced Forward Computation with Row-wise Product-Based SpGEMM Kernel
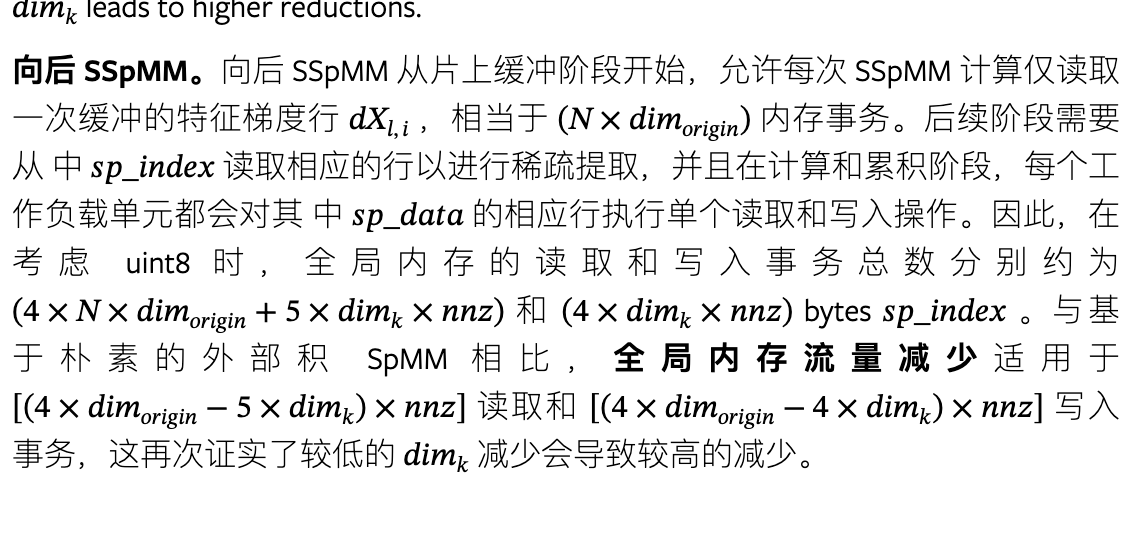
- Optimized Backward Computation with Outer Product-Based SSpMM Kernel Design
sidenote
max-k non-leanrity 是不是一个常见的深度学习术语...?
Background and Related work
GCN
- a graph
which contains |𝒱| nodes and |ℰ| edges - represent as : adjacency matrix A
- Each non-zero entry A(i,j) corresponds to an edge between i and j.
- represent as : adjacency matrix A
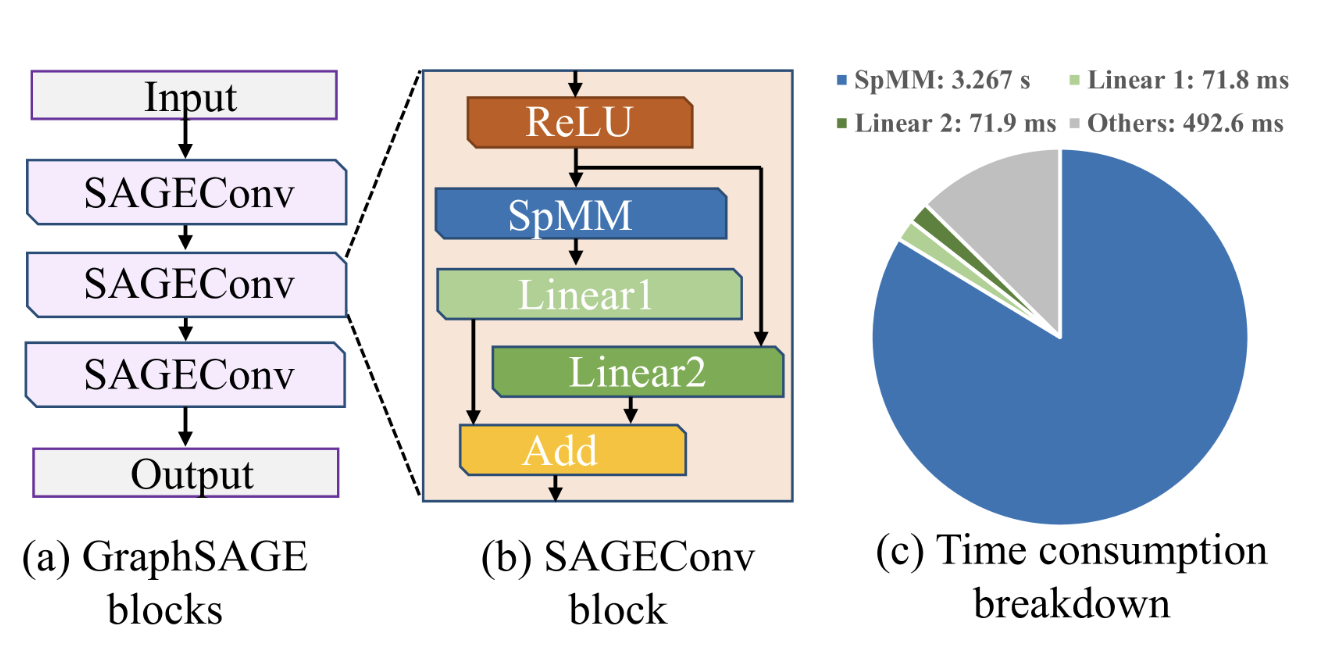
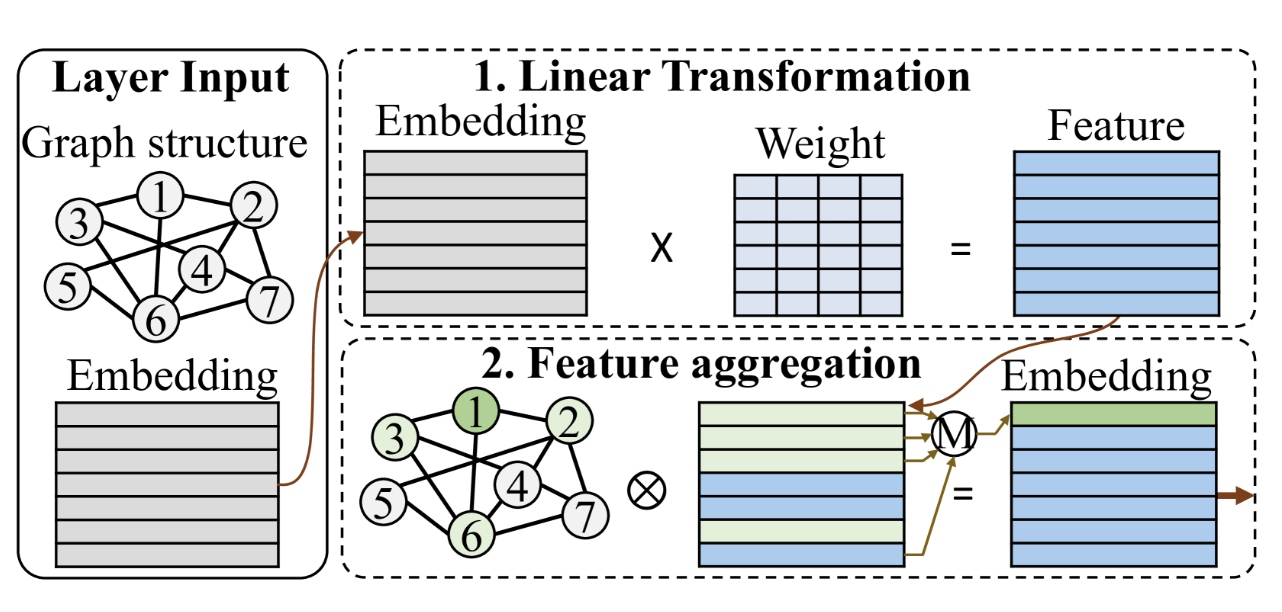
- l-th GCNConv layer has 2 stages
- linear
feature embedding matrix at the -th layer weight matrix
- feature aggregation
【这应该是卷积步骤?不确定】 normalized and regularized adjacency matrix activation function, typically element-wise ReLU
- linear
GNN Acceleration
- PyTorch Geometric (PyG)...utilize message-passing primitives such as scatter and reduce for GNN training on GPUs and FPGA overlays
- memory and storage overheads
- GPU and FPGA acceleration frameworks... uses warp-level partitioning for distributed neighborhood workload
- imbalance...
- MergePath addresses SpMM workload imbalance with a binary search algorithm, but its efficacy decreases with feature dimensions over 128
- graph neighborhood and boundary sampling ⇒ fail to address the SpMM bottleneck
- specialized hardware
Introducing Sparsity in GNN Training
- Dropout: ... challenging to leverage in an system/hardware design.
- Weight Sparsification
- train-and-prune and sparse training
- 这个llm里大概也用...
- adjusting the ReLU threshold can induce greater feature sparsity
- ReLU的0区域就相当于不要某个神经元了,记得6.激活函数这八股文里讨论过
MaxK-GNN Dataflow
we introduce the MaxK nonlinearity
我悟了,这里是通过魔改激活函数,达到稀疏权重的效果,很神奇.....
(另外一个sidenote是,先多看看overview DL的八股文,等到IRL看到某个领域的时候作为思维的脚手架很有帮助...
definition
- (i) During the forward propagation, MaxK nonlinearity is computed on node-wise feature map to get the maximum
element and set the rest to 0. - (ii) During the backward propagation, the feature gradient uses same feature sparsity pattern as induced in forward.
这看起来理论背景很复杂,实现比较(?)简洁,这很符合我的审美...
- WXb ⇒ 在深度学习里的常见含义
- h(X) denotes intermediate feature, which is a piece-wise linear (PWL) function of X
- the MaxK nonlinear operator is positioned before the SpMM operator

- figa,maxk和relu输入输出维度近似?
- figb用MLP拟合
,效果上maxk和relu差不多,所以证明它有效?
sidenote:piece-wise linear (PWL) function
- 原来是分段线性函数的英文,belike relu和高中一些简单的函数题
- 可视化见下

3.1
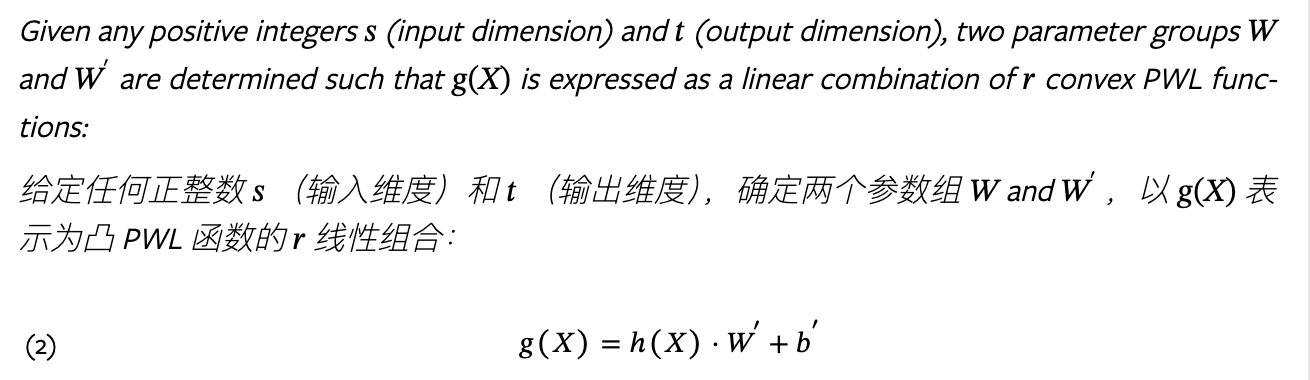
应该就是figa的意思?激活函数换了,所以linear层的参数也不一样?
3.2
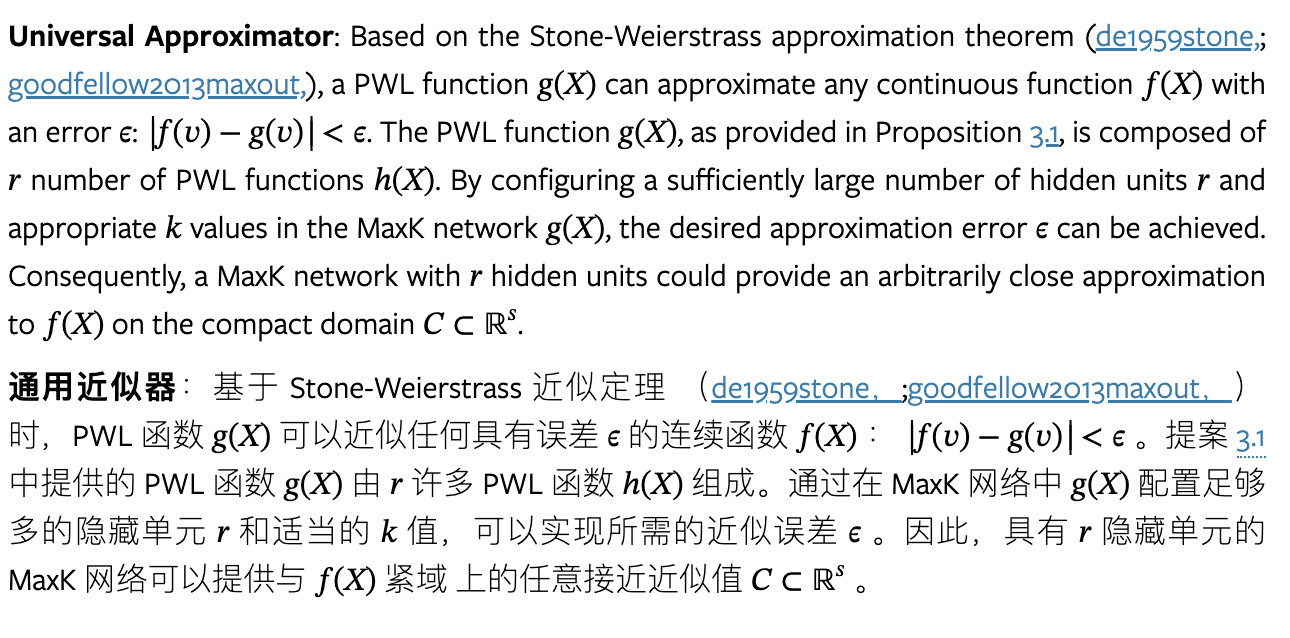
MLP with MaxK Serves as a Universal Approximator. A MaxK network
Universal Approximator
MaxK-GNN Training Dataflow
!MaxK-GNN 2024-09-17.excalidraw
GPU System Support for MaxK-GNN
这里进行到实际的cuda kernel的部分了
forward: 特征提取 kenerl设计
!MaxK-GNN 2024-09-17_0.excalidraw
backward
!MaxK-GNN 2024-09-17_1.excalidraw
内存访问合并指什么?有点搞不明白
dimk好像是topk参数,origin是原来的稀疏结果!
memory system

Kernel Profiling
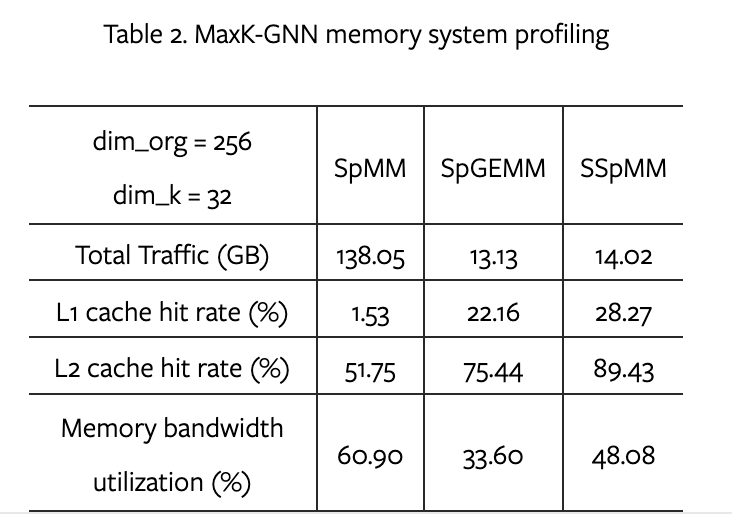
- 当将原始隐藏维度从 256 减少到 k为 32 时,所提出的 MaxK 非线性和相应的内核支持将总全局内存流量减少了近 90.5% / 89.8%
- L1 Cache命中率非常高...
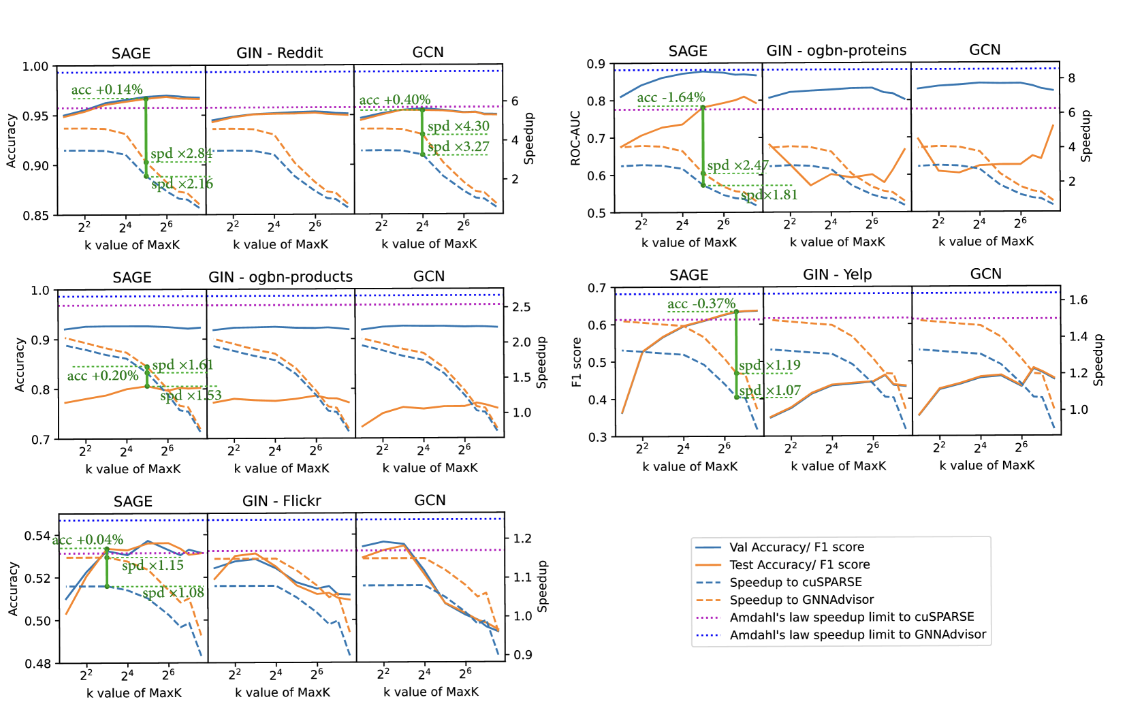
eval
按warp提取信息的设计

此计算采用基于行积的 SpGEMM 方案 ( srivastava2020matraptor, ) ,其中
我们使用了一种 warp-level 分区方案 。结合片上缓冲机制,该方法可以实现 warp-level 平衡和合并全局内存访问,从而显著提高计算效率
怎么操作?
如图 6 (b) 所示,参与计算的每条边 ei,j 构成一个工作负载单元。在该单元中, ei,j 与稀疏行 sp_dataj 相乘,然后在缓冲区 Bufw 中进行累加,该缓冲区的索引为 sp_indexj 。随后,将每个邻接矩阵行 Arowi 的工作负载分割为多个边组 ( EGs )。每个 EG 预留一块共享的 ( dimorigin×4 字节) 空间,作为稀疏累加的中间缓冲区。
首先将每个邻接矩阵行 Arowi 的工作负载分割成边缘组 (EG)。为了在计算和累积阶段优化 EG 的执行,我们将隐藏维度集成到 Warp 映射策略中。
- 在 dimk≤16 的场景下(如图 6 (b) 中的情况 1 所示),每个标准 Warp 包含 ⌊32/dimk⌋ 个 EG 工作负载,EG 被限制在同一个 Warp 中,以避免 EG 跨越多个 Warp 时可能发生的内存访问冲突。
- 相反,如果是 dimk>16 (如图 6 (b) 中的情况 2 所示),EG 由单个 Warp 迭代执行处理。每个 EG 的执行由相应的 Warp 执行,结果按照 sp_index 中的索引聚合到共享内存缓冲区中的相应位置。
以图里为例,32/3 = 10,但似乎图里只用了6个,从何理解呢?
在下一阶段(图 6 中的第 2 阶段),来自每个共享内存缓冲区 Bufw 的数据将以原子方式累积到全局内存中其对应的 Xl 输出中。由于共享内存缓冲区和输出嵌入 ( dimorigin ) 的维度相同,因此保留了自然 Warp 的线程组织方式,每个 Warp 循环处理单行数据,从而确保了高效且合并的计算结构。